近日,機械工程學部青年教師李振雨博士圍繞面向復雜極端環境移動機器人位置識別方法的研究成果發表在《IEEE Transactions on Industrial Informatics》(中科院一區Top期刊,IF: 11.7)、《IEEE Transactions on Intelligent Transportation Systems》(中科院一區Top期刊,IF: 7.9)等學術期刊。李振雨為文章的第一作者和通訊作者,上海交通大學、同濟大學和上海應用技術大學為研究成果的合作單位。
在《IEEE Transactions on Industrial Informatics》發表的論文“Toward Robust Visual Place Recognition for Mobile Robots With an End-to-End Dark-Enhanced Net”,以低光照下環境的移動機器人位置識別為研究對象,通過訓練一個輕量級低光照增強網絡,利用殘差連接的對抗學習模型方法有效改善圖像照度質量。在此基礎上,構建了雙級采樣的金字塔變換器,通過聚合重構描述符提取判別特征。此外,還構建了一種基于交叉熵損失的重排名網絡,進一步提升位置識別的精度。技術路線如圖1所示。
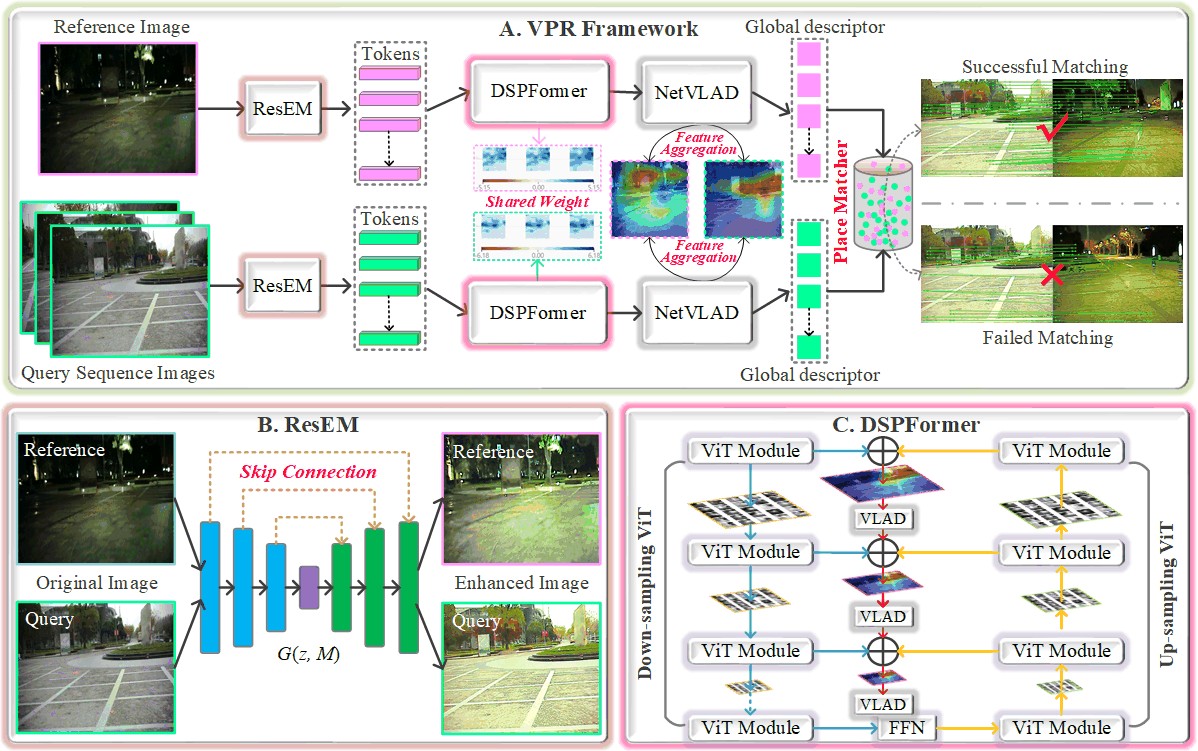
圖1 基于低光照增強網絡的移動機器人位置識別技術路線
在《IEEE Transactions on Intelligent Transportation Systems》發表的論文“Feature-Level Knowledge Distillation for Place Recognition Based on Soft-Hard Labels Teaching Paradigm”,以全天候機器人位置識別為研究對象,通過從幾個“教師網絡”到孿生“學生網絡”的知識遷移,學習一個緊湊、快速的全天位置識別器。根據環境的復雜程度,“教師網絡”可以通過軟、硬標簽兩種教學范式向兩類學生遷移知識。為了平衡計算內存和性能,“教師網絡”被設計為一個兩級采樣視覺Transformer管道,而孿生“學生網絡”被設計為輕量級管道。技術路線如圖2所示。
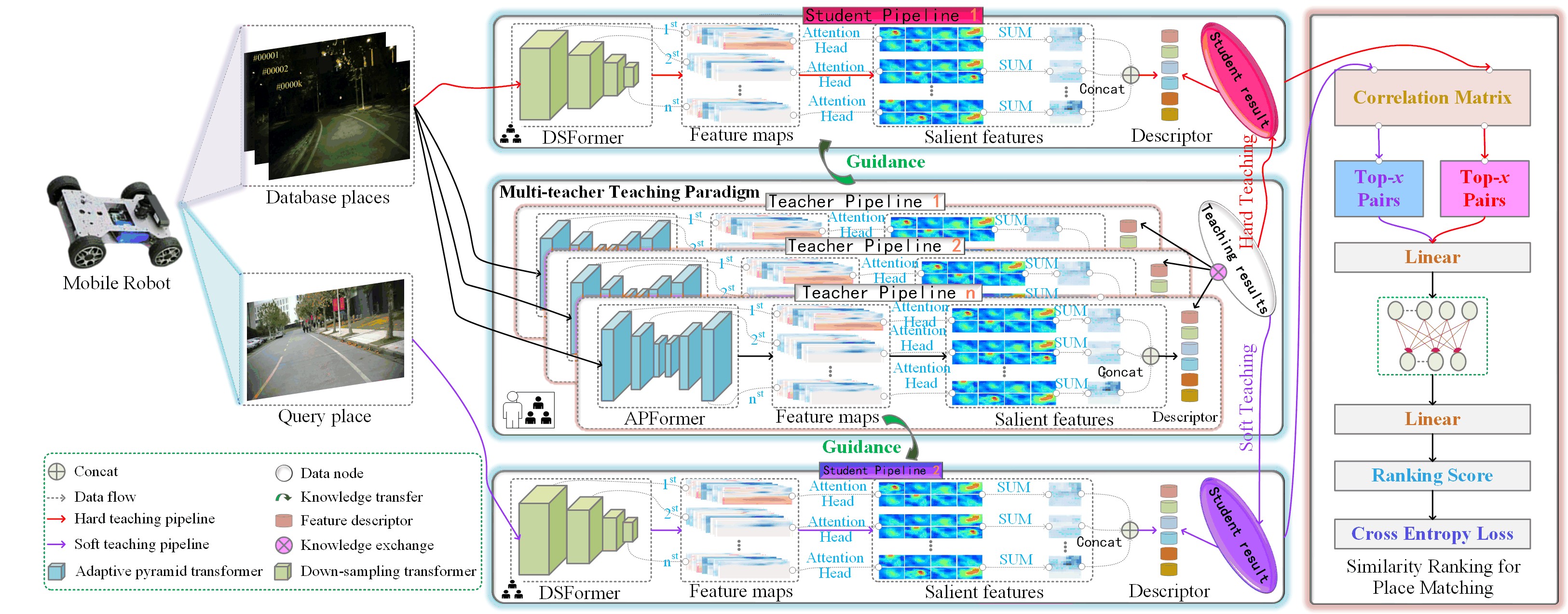
圖2 基于軟硬兼施教學范式的移動機器人位置識別技術路線
在《Neurocomputing》發表的論文“CSPFormer: A cross-spatial pyramid transformer for visual place recognition”,構建了一種跨空域金字塔轉換器,通過將CNN金字塔特征與Transformer多尺度特征融合加權,實現跨空間特征表征。在此基礎上,構建多重自注意層,強化多尺度視覺描述符的長期依賴性,降低計算成本,實現更高效的移動機器人視覺位置識別。技術路線如圖3所示。
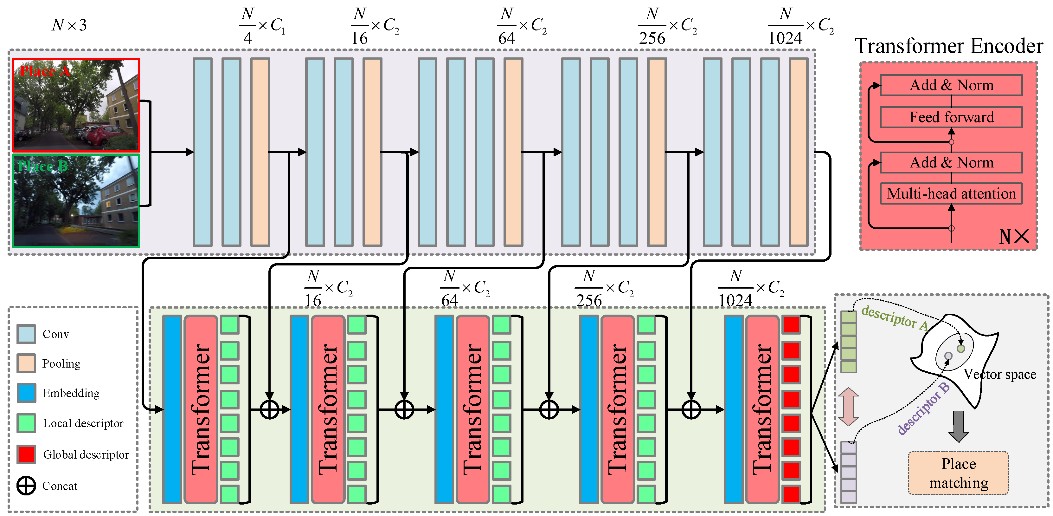
圖3 基于跨空域金字塔模型的移動機器人位置識別技術路線
論文鏈接:1.https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=10726589;
2.https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=10759546;
3.https://www.sciencedirect.com/science/article/pii/S0925231224002431。

